Actualités
LARA, la technologie robotique laser pour des chirurgies avancées
Le projet LARA (LAser Robotic Applications) poursuit ses développements et le consortium s'est réuni fin novembre à l'Institut d'Optique d'Aquitaine. Lancé en 2022, ce projet vise à réaliser un prototype (appelé machine LARA) combinant une source laser femtoseconde optimisée pour la découpe de l'os en chirurgie maxillo-faciale avec un bras robotisé et des systèmes de positionnement et de monitoring.
Un pas vers la robotique automatisée
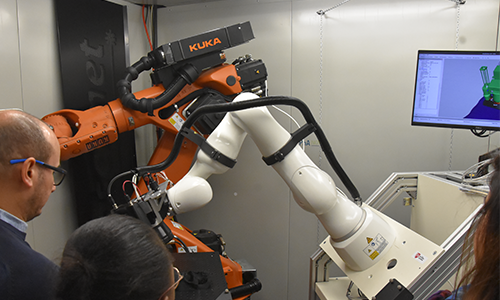
En juillet dernier, une nouvelle phase du projet a été amorcée avec l'intégration d'une machine qui consiste à intégrer l'ensemble des briques technologiques fournies par les différents partenaires du projet : bras robotisé, OCT, dispositif de scan jumeau numérique...). Lors du consortium meeting de novembre, ces derniers (CHU de Bordeaux, CRITT Informatique, Institut Pprime, Tecnalia) ainsi que la région Nouvelle-Aquitaine qui finance ce projet, étaient présents pour découvrir le dispositif LARA et assister à une démonstration de son fonctionnement. Une démo mise en place dans les laboratoires d'ALPhANOV a permis de présenter le workflow suivi par les cliniciens permettant la réalisation des gestes chirurgicaux complexes avec une précision accrue et de façon complètement automatisée.
machine qui consiste à intégrer l'ensemble des briques technologiques fournies par les différents partenaires du projet : bras robotisé, OCT, dispositif de scan jumeau numérique...). Lors du consortium meeting de novembre, ces derniers (CHU de Bordeaux, CRITT Informatique, Institut Pprime, Tecnalia) ainsi que la région Nouvelle-Aquitaine qui finance ce projet, étaient présents pour découvrir le dispositif LARA et assister à une démonstration de son fonctionnement. Une démo mise en place dans les laboratoires d'ALPhANOV a permis de présenter le workflow suivi par les cliniciens permettant la réalisation des gestes chirurgicaux complexes avec une précision accrue et de façon complètement automatisée.
Des systèmes de mesure à la précision de pointe
Un système de mesure optique 3D monté sur l'effecteur du bras robotique initialise la reconstruction numérique du crâne du patient impliquant la fusion de plusieurs nuages de points acquis depuis plusieurs points de vue. Cette reconstruction représente à la fois la surface à opérer au sein d'un jumeau numérique à des fins de supervision et guide l'orientation du laser.
Un dispositif de repérage 3D utilisant des détecteurs IR permet de connaître à tout moment le positionnement des éléments présents dans le bloc opératoire (robot LARA, table opératoire, patient) et le positionnement exact du bras robotique. Un détecteur IR est également intégré au stylet que le chirurgien utilise pour tracer la trajectoire de découpe sur le crâne du patient dans la phase de planification pré-opératoire. Cette trajectoire est ensuite transformée en trajectoire numérique qui sera par la suite mise en oeuvre grâce à une combinaison des mouvements du bras robot et du scanner laser afin de déplacer le faisceau laser sur la zone chirurgicale à traiter.
Le projet LARA présente une avancée significative dans l'intégration de technologies de pointe, comme les lasers femtoseconde associés à la robotique, pour révolutionner la chirurgie maxillo-faciale. Grâce à la collaboration réussie entre les partenaires et la démonstration réalisée pendant la réunion de consortium, ce prototype ouvre la voie à une exploitation prometteuse de la technologie robotique laser pour des chirurgies avancées.